|
Clawar Competitions
2000-2004
|
|
The Clawar Climbing Robot Competition has been organized each year since 2000 during the Clawar Conference. The rules, very flexible, are always the same: design a robot to climb a flat vertical wall (magnetic or non-magnetic) avoiding obstacles in the path. The major challenge of the competition is to climb a vertical wall starting from a horizontal plane. The winner is chosen depending on various criterions: i) Novelty, ii) Easy of use, iii) Level of autonomy/intelligence, iv) Speed / time of ascent, v) Versatility - Capability to complete several of the set tasks, vi) Simplicity of concept for commercial manufacture.
The University of Catania participated to all of these competitions; a brief summary is reported in the next section.
|
|
Madrid 2000
|
 During the 3rd Clawar Conference (Madrid, 2000), the first competition was organized, the University of Catania participated in a very strange manner, in fact, contrary to the Clawar rules the presented autonomous robot could descent the wall but not climb. The robot SCID (Sliding Climbing Inspection Device) did not used any actuators, it only used two electromagnets connected via rotational joints.
By attaching one electromagnet to the vertical wall and by controlling the sliding of the other one, the robot could follow a descent path. It was equipped with a ST5 microcontroller and an inclinometer.
During the 3rd Clawar Conference (Madrid, 2000), the first competition was organized, the University of Catania participated in a very strange manner, in fact, contrary to the Clawar rules the presented autonomous robot could descent the wall but not climb. The robot SCID (Sliding Climbing Inspection Device) did not used any actuators, it only used two electromagnets connected via rotational joints.
By attaching one electromagnet to the vertical wall and by controlling the sliding of the other one, the robot could follow a descent path. It was equipped with a ST5 microcontroller and an inclinometer.

The Team:
Domenico Longo |
|
Karlsruhe 2001
|
 The 4th Clawar conference was organized in Karlsruhe (2001), the robot presented to that competition (Alicia Prototype) was very simple and at very low cost. It used a single, large suction cup, with onboard air pump, to adhere to various types of clean surfaces. A ST5 microcontroller was used to pilot two modified servo motor for locomotion and to acquire the inclinometer and the IR measurements.
The 4th Clawar conference was organized in Karlsruhe (2001), the robot presented to that competition (Alicia Prototype) was very simple and at very low cost. It used a single, large suction cup, with onboard air pump, to adhere to various types of clean surfaces. A ST5 microcontroller was used to pilot two modified servo motor for locomotion and to acquire the inclinometer and the IR measurements.

The Team:
Domenico Longo |
|
Paris 2002 (Winner)
|
 The third Clawar Climbing Competition was carried out in Paris (2002) during the 5th Int. Clawar conference.
The designed robot Alicia I was a very simple evolution of the first prototype, even if it may seem very different because of the suction cup that has been redesigned entirely, the wheels have been placed outside the suction cup to increase their distance and different kind of IR sensors were adopted for the obstacle avoidance.
Moreover the use of a crossed sensors disposition, gave the best obstacle avoidance behaviours, indeed, the traditional disposition could bring to unseen obstacles. The navigation algorithm, considered different weights for each sensor to understand the obstacles position. Alicia I was the winner of this competition.
The Alicia I robot was a very simple structure with big potential, but had limited capabilities when obstacles higher than 1 cm are on the wall.
For this reason inspired from Alicia I experience a new professional robot called Alicia3 has been realized. It has a modular system with three feet, each with two actuated wheels. The three feet are linked together and actuated with two pneumatic pistons.
The third Clawar Climbing Competition was carried out in Paris (2002) during the 5th Int. Clawar conference.
The designed robot Alicia I was a very simple evolution of the first prototype, even if it may seem very different because of the suction cup that has been redesigned entirely, the wheels have been placed outside the suction cup to increase their distance and different kind of IR sensors were adopted for the obstacle avoidance.
Moreover the use of a crossed sensors disposition, gave the best obstacle avoidance behaviours, indeed, the traditional disposition could bring to unseen obstacles. The navigation algorithm, considered different weights for each sensor to understand the obstacles position. Alicia I was the winner of this competition.
The Alicia I robot was a very simple structure with big potential, but had limited capabilities when obstacles higher than 1 cm are on the wall.
For this reason inspired from Alicia I experience a new professional robot called Alicia3 has been realized. It has a modular system with three feet, each with two actuated wheels. The three feet are linked together and actuated with two pneumatic pistons.

The Team:
Federico Musarra |
|
Catania 2003 (Winner)
|
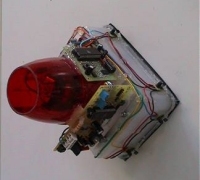
 In 2003 the 6th Int. Clawar conference was held in Catania, two Catania robots participated to the competition: Alicia I, the same robot that participated the year before and a new robot: Abran. Abran was realized starting from a commercial platform BoeBot based on a Basic Stamp microcontroller board, two strong magnets were mounted under the chassis in order to have the necessary attraction with the climbing wall. The system was a dual drive, actuated with two modified servomotors and also had an inclinometer and some IR sensors to estimate the obstacles positions. Also in the 2003 edition Alicia I was the winner.
In 2003 the 6th Int. Clawar conference was held in Catania, two Catania robots participated to the competition: Alicia I, the same robot that participated the year before and a new robot: Abran. Abran was realized starting from a commercial platform BoeBot based on a Basic Stamp microcontroller board, two strong magnets were mounted under the chassis in order to have the necessary attraction with the climbing wall. The system was a dual drive, actuated with two modified servomotors and also had an inclinometer and some IR sensors to estimate the obstacles positions. Also in the 2003 edition Alicia I was the winner.

The Team:
|
|
Madrid 2004 (Second Place)
|
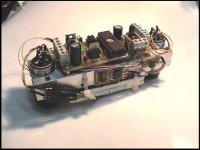
 The fifth Clawar competition was organized during the 2004 Clawar conference in Madrid. A new robot named "Venom" was designed with a completely new architecture: Some magnets for the attraction, a pair of servomotors and a dual drive system for the locomotion, a inclinometer and some IR sensors for navigation and obstacles avoidance.
A ST10 microcontroller was adopted to pilot the robot and to decode the signals of a modified optical mouse used for localization.
In this edition Venom reached the second position at the competition.
The fifth Clawar competition was organized during the 2004 Clawar conference in Madrid. A new robot named "Venom" was designed with a completely new architecture: Some magnets for the attraction, a pair of servomotors and a dual drive system for the locomotion, a inclinometer and some IR sensors for navigation and obstacles avoidance.
A ST10 microcontroller was adopted to pilot the robot and to decode the signals of a modified optical mouse used for localization.
In this edition Venom reached the second position at the competition.

The Team:
Alfonso Isola Michele Casella Filippo Grassia |
|
Vienna 2004 (Second Place)
|
 A similar competition has been organized during the First CLAWAR/EURON Workshop on Robots in Entertainment, Leisure and Hobby ELH04 which took place in Vienna Austria.
A similar competition has been organized during the First CLAWAR/EURON Workshop on Robots in Entertainment, Leisure and Hobby ELH04 which took place in Vienna Austria.
The robot Alicia I has been used to partecipate to this climbing competition winning the second place. 
The Team:
Daniele Caltabiano |
|
Images and Videos
|
|
|
|
Links
|
|
Publications
|
|