- D. Longo, G. Muscato, "A climbing robot for risk reduction in petrochemical industrial inspection", CISAP-1, 1st Italian Convention on Safety & Environment in Process Industry - 28-30 November, 2004 Palermo, Italy. Chemical Engineering Transactions, Vol. 5 2004, pp. 261-266.
- D. Longo, G. Muscato, "Design and Control Methodologies for the Climbing Robot Alicia II", 5th International conference on Climbing and Walking Robots, CLAWAR 2002, Paris France, September 25-27, 2002.
- D. Longo, G. Muscato, "Neural control of the climbing robot Alicia", 1st International IEEE/EURON Workshop on Advances in Service Robotics ASER 2003 , Bardolino (Verona), March 2003.
- D. Longo, G. Nunnari, G. Muscato,"Neural network system identification for a low pressure non-linear dynamical subsystem onboard the Alicia II climbing robot", 13th IFAC Symposium on system Identification, Rotterdam (The Netherland), 27-29 August 2003.
- G. Cacopardo, D. Longo, G. Muscato, "Design of the Alicia3 robot - A modular approach", 6th International Conference on Climbing and Walking Robot, Catania (Italy), pp. 801-808, 17-19 September 2003.
- D. Longo, G. Muscato, "Design of a single sliding suction cup robot for inspection of non porous vertical wall", Proceedings of 35th International Symposium on Robotics - 23-26 March 2004 Paris - France.
- D. Longo, G. Muscato, "Control architecture for the Alicia3 climbing robot", Proceedings of 10th International Symposium on Robotics and Applications WAC - ISORA 2004 - 28 june, 1 July 2004 Seville - Spain.
- D. Longo, G. Muscato, "Adhesion control for the Alicia3 climbing robot", 7th International Conference on Climbing and Walking Robot, Madrid (Spain), 22-24 September 2004.
- D. Longo, G. Muscato, "A modular approach for the design of the Alicia3 climbing robot for industrial inspection", Industrial Robot: An International Journal, Vol. 31, N. 2, pp.148-158, 2004.
- D. Longo, G. Muscato, "The Alicia3 climbing robot for automatic wall inspection" submitted to the IEEE Robotics and Automation Magazine - Special Issue on Climbing Robots
- D. Longo, G. Muscato, S. Sessa “Simulator for locomotion control of the Alicia3 climbing robot“, CLAWAR 2005 8th International Conference on Climbing and Walking Robots September 13-15, 2005 - LONDON, U.K.
- D. Longo, G. Muscato, S. Sessa “Simulation and locomotion control for the Alicia3 climbing robot“, 22nd International Symposium on Automation and Robotics in Construction ISARC 2005 - September 11-14, 2005, Ferrara (Italy), 2005.
|
 The Alicia II and the Alicia3 systems are two climbing robot for inspection of vertical surfaces. To keep the operation of the system independent from the surface material (non-porous), pneumatic-like adhesion has to be used. The most common way to do this is by using suction cups and a vacuum generator. Such a kind of gripping system has normally to be mounted on a structure that is able to generate steps, because traditional suction cups cannot slide over the surface while attached. This kind of structure requires complex kinematics and actuators system and generally leads to slow and heavy robots. The main idea was to build a robot that is a suction cup itself that is able to slide over the wall surface while staying attached.
The Alicia II and the Alicia3 systems are two climbing robot for inspection of vertical surfaces. To keep the operation of the system independent from the surface material (non-porous), pneumatic-like adhesion has to be used. The most common way to do this is by using suction cups and a vacuum generator. Such a kind of gripping system has normally to be mounted on a structure that is able to generate steps, because traditional suction cups cannot slide over the surface while attached. This kind of structure requires complex kinematics and actuators system and generally leads to slow and heavy robots. The main idea was to build a robot that is a suction cup itself that is able to slide over the wall surface while staying attached.
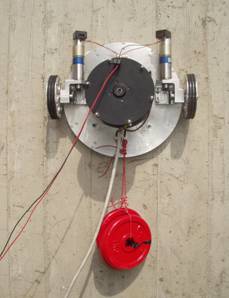 The structure of the Alicia II module is composed by a cup with 30 cm diameter. On-board is mounted a centrifugal aspirator and its electrical motor. The aspirator is used to depressurize the cup so the whole robot can adhere to the wall like a standard suction cup. The motor/aspirator set is a very robust one and is capable to work in very harsh environment. While the system has to move over the target surface, generally represented by rough metal surface or concrete wall, the cup must not adhere with high friction, so a particular kind of sealing between the wall and the robot has been realized. This configuration allows the robot to overcome obstacle of about 1 cm and to climb a vertical surface with a minimum curvature radius of 1.8 m. The whole structure has been designed to contain onboard two wheels with two independent DC motors/gearboxes/encoders. The total weight of the module is 4 Kg all included. The used DC motors/gearboxes are able to move a mass up to 6 Kg along a vertical direction with a maximum speed of 2 m/min.
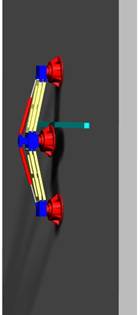
The structure of the Alicia II module is composed by a cup with 30 cm diameter. On-board is mounted a centrifugal aspirator and its electrical motor. The aspirator is used to depressurize the cup so the whole robot can adhere to the wall like a standard suction cup. The motor/aspirator set is a very robust one and is capable to work in very harsh environment. While the system has to move over the target surface, generally represented by rough metal surface or concrete wall, the cup must not adhere with high friction, so a particular kind of sealing between the wall and the robot has been realized. This configuration allows the robot to overcome obstacle of about 1 cm and to climb a vertical surface with a minimum curvature radius of 1.8 m. The whole structure has been designed to contain onboard two wheels with two independent DC motors/gearboxes/encoders. The total weight of the module is 4 Kg all included. The used DC motors/gearboxes are able to move a mass up to 6 Kg along a vertical direction with a maximum speed of 2 m/min. The Alicia II robot has limited capabilities in passing over obstacles higher than about 1 cm. This limitation is mainly due to the maximum height of the flexible cup sealing that cannot be higher than a few centimetres. The basic idea for the Alicia3 robot is to use three of the Alicia II modules linked together in series by means of two rod, to allow the whole system to deal better with obstacles on the target surface.
The Alicia II robot has limited capabilities in passing over obstacles higher than about 1 cm. This limitation is mainly due to the maximum height of the flexible cup sealing that cannot be higher than a few centimetres. The basic idea for the Alicia3 robot is to use three of the Alicia II modules linked together in series by means of two rod, to allow the whole system to deal better with obstacles on the target surface.