 The
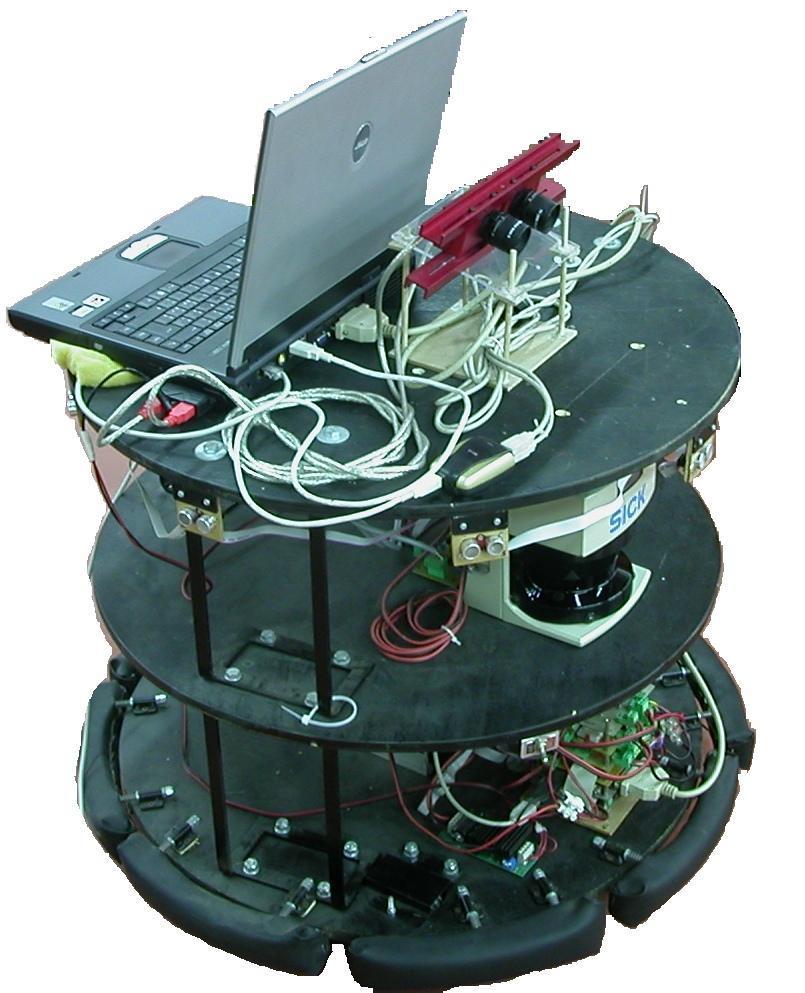
3MO.R.D.U.C. is a wheeled mobile robot with a differential drive
kinematic configuration. This open robotic platform was successfully
used in localization and navigation experiments. The robot structure
has three shelves linked together. On the lowest shelf, two lead
batteries (12V/18Ah) provide the power supply. The robot autonomy is
about 30-40 min. for continuous working. The on board electronic rack
controls each module of the robot (motion, sensors and communication
modules). Several sensors on board monitor the workspace and the robot
state. A belt of bumpers (16 switches) around the entire perimeter is
mounted on the robot base, just over the wheels level. These sensors
recognize and reduce damage in case of a collision. The two robot motor
axes are equipped with incremental encoders (resolution of 500 pulses
per turn). These sensors are useful to calculate heading and position
of the robot by using the kinematic model. To detect obstacles on the
workspace the robot has an on board Laser Measurement Sensor (LMS) and
a sonar belt (8 sonars).The LMS operates by measuring the flight time
of a pulsed laser light beam that is reflected by obstacle. An internal
rotating mirror deflects the transmitted pulsed laser beam so that a
scan is made Stereoscopic Robot Teleguide based on Laser and Video
sensors of the surrounding area. The time between transmission and
reception of the light pulse is directly proportional to the distance
between the scanner and the object. The sonar sensors measure the
distance from an obstacle using the flight time of an ultrasonic signal
produced by means of a vibrating piezoelectric sensor. On the robot
there are also two high quality stereoscopic cameras; each one has a
resolution of 1.3 Megapixel; they are equipped with fixed focus lens of
4.0 mm.
The
3MO.R.D.U.C. is a wheeled mobile robot with a differential drive
kinematic configuration. This open robotic platform was successfully
used in localization and navigation experiments. The robot structure
has three shelves linked together. On the lowest shelf, two lead
batteries (12V/18Ah) provide the power supply. The robot autonomy is
about 30-40 min. for continuous working. The on board electronic rack
controls each module of the robot (motion, sensors and communication
modules). Several sensors on board monitor the workspace and the robot
state. A belt of bumpers (16 switches) around the entire perimeter is
mounted on the robot base, just over the wheels level. These sensors
recognize and reduce damage in case of a collision. The two robot motor
axes are equipped with incremental encoders (resolution of 500 pulses
per turn). These sensors are useful to calculate heading and position
of the robot by using the kinematic model. To detect obstacles on the
workspace the robot has an on board Laser Measurement Sensor (LMS) and
a sonar belt (8 sonars).The LMS operates by measuring the flight time
of a pulsed laser light beam that is reflected by obstacle. An internal
rotating mirror deflects the transmitted pulsed laser beam so that a
scan is made Stereoscopic Robot Teleguide based on Laser and Video
sensors of the surrounding area. The time between transmission and
reception of the light pulse is directly proportional to the distance
between the scanner and the object. The sonar sensors measure the
distance from an obstacle using the flight time of an ultrasonic signal
produced by means of a vibrating piezoelectric sensor. On the robot
there are also two high quality stereoscopic cameras; each one has a
resolution of 1.3 Megapixel; they are equipped with fixed focus lens of
4.0 mm.The CCD sensors of these cameras have a good noise immunity and sensibility; moreover, it is possible to adjust all the image parameter, e.g.
exposure gain, frame rate, resolution. The cameras are mounted on a rigid support; it permits to simply adjust the camera distance in a range 5-20 cm.