 The robot, which is currently available in the C.R.A.M. laboratories, comprises a trolley which allows moving autonomously among the rows of orange trees, and two picking arms controlled by visual feedback. Each arm is equipped with a camera to identify and centre the fruit. Inside the pickers two pneumatic actuators control the jaw and clippers and a third one command a sliding tray placed at the bottom of the pincers, which slides out before the stalk is cut. The presence of this tray, along with the lengthening of the lower jaw, allows the orange to remain trapped inside
The robot, which is currently available in the C.R.A.M. laboratories, comprises a trolley which allows moving autonomously among the rows of orange trees, and two picking arms controlled by visual feedback. Each arm is equipped with a camera to identify and centre the fruit. Inside the pickers two pneumatic actuators control the jaw and clippers and a third one command a sliding tray placed at the bottom of the pincers, which slides out before the stalk is cut. The presence of this tray, along with the lengthening of the lower jaw, allows the orange to remain trapped inside 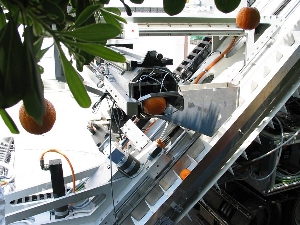 The degrees of freedom the manipulator is endowed with, allow scanning and picking in an diagonal direction, while the forward movement of the trolley advances to the next picking area.
The degrees of freedom the manipulator is endowed with, allow scanning and picking in an diagonal direction, while the forward movement of the trolley advances to the next picking area. An equally important feature is the integrated handling system to facilitate arrangement of the crates, thus enabling almost immediate transportation.