 The key project in the field of Unmanned Aerial Systems is
represented by the Volcan UAV, designed
to study the composition of gas inside volcanic plumes. The main aim of the
system is that of flying inside the plume (volcanic cloud) to directly analyze the
concentration of the main components of the fumes (HCl, SO2 and CO2),
but also the pressure, the temperature and the wind speed. The system must be
capable of flying autonomously at up to 4000m altitude with a payload of 5Kg
using electric motors, to avoid contaminations with the gas sampling system, at
a cruise speed of 40km/h.
The key project in the field of Unmanned Aerial Systems is
represented by the Volcan UAV, designed
to study the composition of gas inside volcanic plumes. The main aim of the
system is that of flying inside the plume (volcanic cloud) to directly analyze the
concentration of the main components of the fumes (HCl, SO2 and CO2),
but also the pressure, the temperature and the wind speed. The system must be
capable of flying autonomously at up to 4000m altitude with a payload of 5Kg
using electric motors, to avoid contaminations with the gas sampling system, at
a cruise speed of 40km/h.The electronic control system and the measurement systems have been designed, built and tested and are currently employed on the plane.
Download “Volcan UAV”
for an exhaustive description of the project.
The next phase is the gas sampling on the volcanic area, planned for
the beginning of the spring 2009.
R&D in the field of UAS covers several aspects related to the topic of flying platforms:
- Autonomous Navigation
Stability and waypoints navigation algorithms have been developed and tested and are currently employed on the fleet.
- Sensors Units
Inertial Measurement Units (IMU), Air Data Attitude and Heading Reference Systems (AHRS), Inertial Navigation Systems (INS), calibrated and compensated compass have been realized by making the most of sensors fusion algorithms.
Extended Kalman Filtering, quaternion algebra, sensor modelling have been examined in order to develop noise-free calibrated sensors units able to guarantee high performance in all conditions and environments.
- Control algorithms self-tuning
Autonomous navigation algorithms often require a certain number of hours of flight tests to determine the best values for the parameters involved in the control loops. Self-tuning procedures are actually under study to make fast and easy values determination, allowing a reduction of field trials.
- Computer Vision Algorithms
Images coming from UAVs are used for target detection and localization, for moving targets (UGV) tracking , for UAV position estimation, to detect safe landing areas for UAV.
- UAV-UGV cooperation
Several studies have fully demonstrated the benefits coming from the cooperation between heterogeneous set of machines: the integration of data coming from several type of sensors and from different points of view allows to increase the informative contents, leading to a “cooperative perception”. In this sense, UAV and UGV represent complementary vehicles, the use of whom represents, together an integrated sensors network, a powerful surveillance and monitoring system.

UAVs (Volcan) are used for area overseeing and emergency communication and terrain morphology changes detection, UGVs (Robovolc) are involved in area approaching and sampling and measuring operations.
The Hardware in Loop (HIL) architecture represents a powerful and cheap method to test and tune control systems. The case of tuning devices involved in the aeronautical field is very critical, since experimental trials are performed with time-consuming test flights and unsatisfactory results could lead to dangerous situations. An HIL simulator cannot fully replace field experiments, but it is very useful, especially in the preliminary phases, to discover and solve various kinds of problems. Therefore, the major aim of an HIL platform regards improvement in development time, cost and risk reduction. Once the performance is suitable for the application, the same controller hardware can be directly connected to the real UAV.
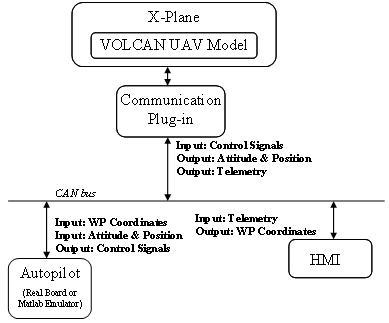
In the figure above the developed architecture is represented. In this case study, the X-Plane flight simulator by Laminar Research, was adapted to the Volcan UAV: a model of the real aircraft was developed to determine the flight parameters; AHRS and GPS data are sent out to the autopilot through a CAN Bus, using a dedicated plugin and using the CANaerospace protocol. The block named “Autopilot” is the real electronic board while the HMI runs on a separate PC.
X-Plane flight simulator and Google Earth based simulation tool are used to develop and validate control, navigation and stability algorithms. Moreover, the implemented tools are used to implement and test aerial target geo-localization algorithms: the software allows to simulate a camera mounted on an airplane and to use the collected virtual images to test methods for the detection and localization of ground targets. A geo-localization algorithm based on an Extended Kalman filter has been implemented by using the developed tool.
The cooperation between a coaxial helicopter and the MORDUC Unmanned Ground Vehicle is under study in order to create a robotic system based on the adoption of heterogeneous unmanned vehicles. A vision algorithm able to estimate the position of a coaxial helicopter was developed; the implementation of a discrete Kalman filter allowed to obtain more accurate and less noisy data values. The dynamic model of a coaxial helicopter was derived and used in order to create a vision-based control system that would allow a three-dimensional tracking. A PID based algorithm was implemented to control the helicopter pose; both empirical and analytical based calibration procedures were adopted to obtain the most performing parameter values.