 The robot WHEELEG has been designed and built in order to investigate the capabilities of hybrid wheeled/legged structures in rough terrain.
The robot WHEELEG has been designed and built in order to investigate the capabilities of hybrid wheeled/legged structures in rough terrain.Possible applications that have been envisaged are humanitarian demining, exploration of unstructured environments like volcanoes etc.
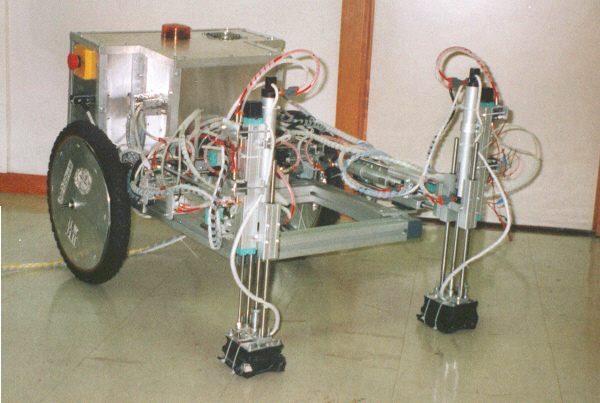
This robot has two pneumatically actuated front legs, each one with three degrees of freedom, and two rear wheels independently actuated by using two distinct DC motors. The main idea was to use rear wheels to carry most of the weight of the robot and front legs to improve the grip with the surface to climb and to overcome obstacles. The robot dimensions are W X L X H =66cm X 111cm X 40cm.
 The WHEELEG has six ST52E301 Fuzzy microcontrollers for the control of the pistons, two DSP HCTL1100 for the control of the wheels and a PENTIUM 200MHz microprocessor for the global trajectory control and the communications with the user.
The WHEELEG has six ST52E301 Fuzzy microcontrollers for the control of the pistons, two DSP HCTL1100 for the control of the wheels and a PENTIUM 200MHz microprocessor for the global trajectory control and the communications with the user.